Ramchandran Muthukumar
Graduate Student
Johns Hopkins University
I am a fifth year PhD Student in the Computer Science Department at Johns Hopkins University. I am fortunate to be advised by Dr. Jeremias Sulam. My work explores theoretical questions in evaluating machine learning models,
- Generalization : performance on unseen data,
- Robustness : performance on corrupted data.
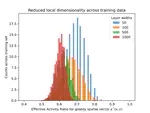
Accounting for local sensitivity of models typically yield tighter theoretical guarantees. The characterization of local sensitivity often relies on underlying parsimony.
Prior to starting my graduate studies, I was a research assistant at Cornell University supervised by Dr. Madeleine Udell. At Ithaca, I worked on developing low-memory algorithms for PDE-optimization based on randomized sketching.
Download my resumé.
- Learning Theory
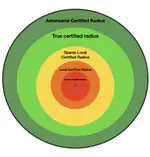
- Adversarial Robustness
- High-dimensional Statistics
- Optimization
PhD in Computer Science, 2019 - current
Johns Hopkins University
MSc in Mathematics, 2018
BITS Pilani
B.E. in Computer Science, 2018
BITS Pilani
Featured Publications

Recent News
[11/18/2023] Poster on Sparsity-aware generalization theory for deep neural networks at DEEPMATH'23 at JHU, Baltimore, MD
[07/12/2023] Poster on Sparsity-aware generalization theory for deep neural networks at COLT'23 at Bangalore, India
[06/14/2023] Poster on Sparsity-aware generalization theory for deep neural networks at Computational Complexity of Statistical Inference Workshop (CCSI) at MIT, Cambridge, MA